Kia Stinger CK: Engine Control / Fuel System / Specifications
Service data
| Service Data |
| Fuel Delivery System |
|
Items |
Specification |
|
|
Fuel Tank |
Capacity |
60 L (15.8 U.S.gal., 63.4 U.S.qt., 52.7 Imp.qt.) |
|
Fuel Filter |
Type |
Paper type |
|
Fuel Pressure |
Low Pressure Fuel Line |
Over 290 kPa (Over 2.9 bar, Over 2.95 kgf/cm², Over 42.06 psi) |
|
High Pressure Fuel Line |
2.0 - 20 MPa (20.4 - 203 kgf/cm², 290.1 - 2900 psi) |
|
|
Fuel Pump |
Type |
Electrical, in-tank type |
|
Driven by |
Electric motor |
|
|
High Pressure Fuel Pump |
Type |
Mechanical type |
|
Driven by |
Camshaft |
|
| Fuel pump motor |
|
Item |
Specification |
||
|
Output Voltage (V) |
12.6 |
||
|
Low Pressure Fuel Line |
bar |
3.5 - 6.0 |
|
|
kPa |
350 - 600 |
||
|
kgf/cm² |
3.5 - 6.1 |
||
|
psi |
50.7 - 87.0 |
||
| Fuel sender |
[Main Fuel Sender]
|
Position |
Resistance (Ω) |
Capacity (ℓ) |
|
E |
148 - 152 |
4.5 |
| 1/2
|
6.5 - 8.5 |
31.2 |
|
F |
6.5 - 8.5 |
58.5 |
[Sub Fuel Sender]
|
Position |
Resistance (Ω) |
Capacity (ℓ) |
|
E |
148 - 152 |
4.5 |
| 1/2
|
148 - 152 |
31.2 |
|
F |
6.5 - 8.5 |
58.5 |
[Main Fuel Sender + Sub Fuel Sender Composite resistance]
|
Position |
Resistance (Ω) |
Capacity (ℓ) |
|
E |
296 - 304 |
4.5 |
| 1/2
|
154.5 - 160.5 |
31.2 |
|
F |
13 - 17 |
58.5 |
| Sensors |
Manifold Absolute Pressure Sensor (MAPS)
▷ Type: Piezo-resistive pressure sensor type
▷ Specification
|
Item |
Specification |
|
Output Voltage (V) |
5 |
|
Pressure (KPa) |
32.5 - 284 |
|
Operating Voltage (V) |
4.5 - 5.5 |
|
Pressure [kPa (kgf/cm², psi)] |
Output Voltage (Vref = 5V) |
|
32.5 (0.33, 4.71) |
0.5 |
|
70 (0.71, 10.1) |
1.1 |
|
270 (2.75, 39.1) |
4.3 |
|
284 (2.89, 41.1) |
4.5 |
Boost Pressure Sensor (BPS)
▷ Type: Piezo-resistive pressure sensor type
▷ Specification
|
Item |
Specification |
|
Output Voltage (V) |
5 |
|
Pressure (KPa) |
32.5 - 284 |
|
Operating Voltage (V) |
4.5 - 5.5 |
|
Pressure [kPa (kgf/cm², psi)] |
Output Voltage (Vref = 5V) |
|
32.5 (0.33, 4.71) |
0.5 |
|
70 (0.71, 10.1) |
1.1 |
|
270 (2.75, 39.1) |
4.3 |
|
284 (2.89, 41.1) |
4.5 |
Intake Air Temperature Sensor (IATS)
▷ Type: Thermistor type
▷ Specification
|
Temperature |
Resistance (kΩ) |
|
|
°C |
°F |
|
|
-40 |
-40 |
40.93 - 48.35 |
|
-20 |
-4 |
13.89 - 16.03 |
|
0 |
32 |
5.38 - 6.09 |
|
10 |
50 |
3.48 - 3.90 |
|
20 |
68 |
2.31 - 2.57 |
|
40 |
104 |
1.08 - 1.21 |
|
50 |
122 |
1.56 - 1.74 |
|
60 |
7140 |
0.54 - 0.62 |
|
80 |
176 |
0.29 - 0.34 |
Ambient Temperature Sensor (ATS)
▷ Specification
|
Temperature[⁰C(⁰F)] |
Resistance(kΩ) |
|
-40(-40) |
811.1 - 956.8 |
|
-20(-4) |
255.6 - 287.7 |
|
0(32) |
91.5 - 98.8 |
|
20(68) |
36.6 - 38.0 |
|
30(86) |
23.8 - 24.7 |
|
40(104) |
15.7 - 16.6 |
|
50(122) |
10.6 - 11.3 |
|
60(140) |
7.2 - 7.9 |
|
80(176) |
3.6 - 4.0 |
Engine Coolant Temperature Sensor (ECTS)
▷ Type: Thermistor type
▷ Specification
|
Temperature |
Resistance (kΩ) |
|
|
°C |
°F |
|
|
-40 |
-40 |
48.14 |
|
-20 |
-4 |
14.13 - 16.83 |
|
0 |
32 |
5.79 |
|
20 |
68 |
2.31 - 2.59 |
|
40 |
104 |
1.15 |
|
60 |
140 |
0.59 |
|
80 |
176 |
0.32 |
Throttle Position Sensor (TPS) [integrated into ETC Module]
▷ Type: Variable resistor type
▷ Specification
|
Throttle Angle(°) |
Output Voltage (V) [Vref = 5V] |
|
|
TPS1 |
TPS2 |
|
|
0 |
0 |
5.0 |
|
10 |
0.48 |
4.52 |
|
20 |
0.95 |
4.05 |
|
30 |
1.43 |
3.57 |
|
40 |
1.90 |
3.10 |
|
50 |
2.38 |
2.62 |
|
60 |
2.86 |
2.14 |
|
70 |
3.33 |
1.67 |
|
80 |
3.81 |
1.19 |
|
90 |
4.29 |
0.71 |
|
100 |
4.76 |
0.24 |
|
105 |
5.0 |
0 |
|
C.T (6-15°) |
0.29 - 0.71 |
4.29 - 4.71 |
|
W.O.T (93-102°) |
4.43 - 4.86 |
0.14 - 0.57 |
Crankshaft Position Sensor (CKPS)
▷ Type: Hall effect type
|
Item |
Specification |
|
Type |
Magnetic field sensitive |
|
Output Voltage (V) |
4.75 - 5.25 (25°C) |
|
Input Voltage (V) |
0.6 - 4.5 |
|
Air Cap (mm) |
0.5 - 1.5 |
Camshaft Position Sensor (CMPS)
▷ Type: Hall effect type
|
Item |
Specification |
|
Air Cap (mm) |
0.2 - 2.0 |
Knock Sensor (KS)
▷ Type: Piezo-electric type
▷ Specification
|
Item |
Specification |
|
Capacitance (pF) |
850 - 1,150 |
|
Resistance (MΩ) |
Approx. 1 |
Heated Oxygen Sensor (HO2S) [Bank 1/Sensor 1]
▷ Type: Zirconia (ZrO2) [Linear] Type
▷ Specification
|
Item |
Specification |
|
Heater Resistance (Ω) |
2.5 - 4.0 [20°C(69.8°F)] |
Heated Oxygen Sensor (HO2S) [Bank 1/Sensor 2]
▷ Type: Zirconia (ZrO2) [Binary] Type
▷ Specification
|
Item |
Specification |
|
Heater Resistance (Ω) |
3.3 - 4.1 [20°C(69.8°F)] |
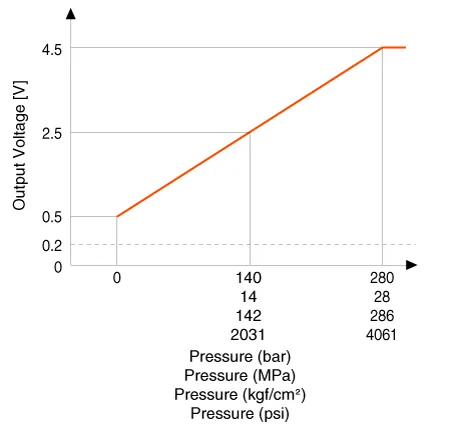
Rail Pressure Sensor (RPS)
▷ Type: Piezo-electric type
▷ Specification
|
Pressure |
Output Voltage (V) [Vref=5V] |
|
|
bar |
[MPa (kgf/cm², psi)] |
|
|
0 |
0 (0, 0) |
0.5 |
|
140 |
14 (142, 2031) |
2.5 |
|
280 |
28 (286, 4061) |
4.5 |
CVVT Oil Temperature Sensor (OTS)
▷ Type: Thermistor type
▷ Specification
|
Temperature [°C (°F)] |
Resistance (kΩ) |
|
-40 |
52.15 |
|
-20 |
28.82 |
|
0 |
14.08 - 19.45 |
|
20 |
2.16 - 2.78 |
|
40 |
1.11 |
|
60 |
0.54 |
|
80 |
0.26 - 0.32 |
|
100 |
0.16 |
|
120 |
0.1 |
|
140 |
0.06 |
Accelerator Position Sensor (APS)
▷ Type: Variable resistor type
▷ Specification
|
Accelerator Position |
Output Voltage (V) [Vref = 5V] |
|
|
APS1 |
APS2 |
|
|
C.T |
0.7 - 0.8 |
0.33 - 0.43 |
|
W.O.T |
3.99 - 4.23 |
1.94 - 2.18 |
| Actuators |
ETC Motor [integrated into ETC Module]
▷ Specification
|
Item |
Specification |
|
Coil Resistance (Ω) |
1.1 - 1.7 [20°C(68°F)] |
Injector
▷ Specification
|
Item |
Specification |
|
Coil Resistance (Ω) |
1.4 - 1.6 [20°C(68°F)] |
Purge Control Solenoid Valve (PCSV)
▷ Specification
|
Item |
Specification |
|
Coil Resistance (Ω) |
18.5 - 22.5 [20°C(68°F)] |
CVVT Oil Control Valve (OCV) [Bank 1 / Exhaust]
▷ Specification
|
Item |
Specification |
|
Coil Resistance (Ω) |
6.9 - 7.9 [20°C(68°F)] |
Fuel Pressure Control Valve (FPCV)
▷ Specification
|
Item |
Specification |
|
Coil Resistance (Ω) |
0.47 - 0.53 [20°C(68°F)] |
RCV Control Solenoid Valve
▷ Specification
|
Item |
Specification |
|
Coil Resistance (Ω) |
28.3 - 31.1 [20°C(68°F)] |
Variable Charge Motion Actuator (VCMA)
▷ Specification
|
Item |
Specification |
|
Coil Resistance (Ω) |
18.5 - 22.5 [20°C(68°F)] |
E-CVVT Motor [Bank 1 / Intake]
▷ Specification
|
Item |
Specification |
|
Operation angle |
90° |
|
Initial postion |
Completely Advance (When starting, it can be adjusted) |
|
Gear ratio |
60:01:00 |
|
Motor Max. power |
140W / 12V |
|
Current |
Max. 35A [-30 °C] / 1A [When maintaining the phase] |
| Fuel Delivery System Item |
Fuel Pump Motor
▷ Specification
|
Item |
Specification |
|
Normal state |
Operate |
Fuel sender
▷ Specification
|
Position |
Resistance (Ω) |
|
E |
297 - 303 |
| 1/2
|
80 - 84 |
|
F |
14 - 16 |
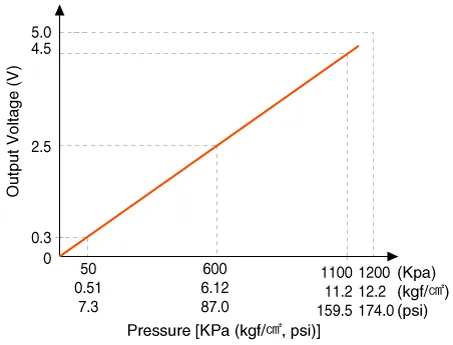
Fuel Pressure Sensor (FPS)
▷ Specification
|
Pressure [KPa (kgf/cm², psi)] |
Output Voltage (V) [Vref = 5V] |
|
50 (0.51, 7.3) |
0.3 |
|
600 (6.12, 87.0) |
2.5 |
|
1100 (11.2, 159.5) |
4.5 |
| Service Standard |
|
Item |
Specification |
||
|
Ignition Timing (°) |
BTDC 6 ± 10 |
||
|
Idle Speed (rpm) |
A/C OFF |
Neutral, N, P-range |
640 ± 100 |
|
D-range |
600 ± 100 |
||
|
A/C ON |
Neutral, N, P-range |
660 ± 100 |
|
|
D-range |
660 ± 100 |
||
Tightening torque
| Tightening Torques |
Engine Control System
|
Item |
kgf·m |
N·m |
lb·ft |
|
ECM bracket mounting bolt/ nut |
1.0 - 1.2 |
9.8 - 11.8 |
7.2 - 8.7 |
|
Electronic Throttle Control (ETC) Module mounting bolt |
1.0 - 1.2 |
9.8 - 11.8 |
7.2 - 8.7 |
|
Manifold Absolute Pressure Sensor (MAPS) mounting bolt |
1.0 - 1.2 |
9.8 - 11.8 |
7.2 - 8.7 |
|
Intake Air Temperature Sensor (IATS) mounting bolt |
1.0 - 1.2 |
9.8 - 11.8 |
7.2 - 8.7 |
|
Boost Pressure Sensor (BPS) mounting bolt |
1.0 - 1.2 |
9.8 - 11.8 |
7.2 - 8.7 |
|
Crankshaft position sensor (CKPS) mounting bolt |
1.0 - 1.2 |
9.8 - 11.8 |
7.2 - 8.7 |
|
Camshaft position sensor (CMPS) [Bank 1 / Intake] mounting bolt |
1.0 - 1.2 |
9.8 - 11.8 |
7.2 - 8.7 |
|
Camshaft position sensor (CMPS) [Bank 1 / Exhaust] mounting bolt |
1.0 - 1.2 |
9.8 - 11.8 |
7.2 - 8.7 |
|
Knock Sensor (KS) mounting bolt |
1.9 - 2.4 |
18.6 - 23.5 |
13.7 - 17.4 |
|
Heated oxygen sensor (HO2S) [Bank 1 / sensor 1] |
4.0 - 5.0 |
39.2 - 49.1 |
28.9 - 36.2 |
|
Heated oxygen sensor (HO2S) [Bank 1 / sensor 2] |
4.0 - 5.0 |
39.2 - 49.1 |
28.9 - 36.2 |
|
Rail Pressure Sensor (RPS) |
1.8 - 2.2 |
18.0 - 22.0 |
13.3 - 16.2 |
|
Accelerator pedal module mounting bolt/nut |
0.9 - 1.4 |
8.8 - 13.7 |
6.5 - 10.1 |
|
CVVT Oil Control Valve (OCV) [Bank 1 / Exhaust] mounting bolt |
1.0 - 1.2 |
9.8 - 11.8 |
7.2 - 8.7 |
|
Variable Charge Motion Actuator (VCMA) mounting bolt |
1.0 - 1.4 |
9.8 - 11.8 |
7.2 - 8.7 |
|
Oil Temperature Sensor (OTS) |
3.5 - 4.5 |
34.3 -44.1 |
25.3 - 32.5 |
|
RCV Control Solenoid Valve |
1.0 - 1.2 |
9.8 - 11.8 |
7.2 - 8.7 |
Fuel Delivery System
|
Item |
kgf·m |
N·m |
lb·ft |
|
Fuel tank band mounting nut |
4.0 - 5.5 |
39.2 - 54.0 |
28.9 - 39.8 |
|
High pressure fuel pipe mounting nut |
2.7 - 3.3 |
26.5 - 32.4 |
19.5 - 23.9 |
|
High pressure fuel pipe function block mounting bolt |
0.8 - 1.2 |
7.8 - 11.8 |
5.8 - 8.7 |
|
Filler-neck assembly bracket mounting bolt |
0.4 - 0.6 |
3.9 - 5.9 |
2.9 - 4.3 |
|
Delivery pipe mounting bolt |
1.9 - 2.4 |
18.6 - 23.5 |
13.7 - 17.4 |
|
High pressure fuel pump mounting bolt |
1.3 - 1.5 |
12.8 - 14.7 |
9.4 - 10.9 |


Other information:
Kia Stinger (CK) 2018-2023 Service Manual: Cluster Fascia Panel
Components and components location Component Location 1. Cluster fascia panel Repair procedures Replacement Put on gloves to protect your hands. • Use a plastic panel removal tool to remove interior trim pieces without marring the surface.Components and components location Components [Standard] 1. Caliper housing 2. Brake member 3. Brake pad assembly [IN] 4. Retainer 5. Brake pad assembly [OUT] 6. Brake pad return spring [Brembo] 1. Caliper housing 2. Brake pad 3. Brake pad 4.Categories
- Manuals Home
- Kia Stinger Owners Manual
- Kia Stinger Service Manual
- New on site
- Most important about car
